

Wie funktioniert Autoguiding?
Erste Schritte mit PHD Guiding
Push Here, Dummy: die ersten Schritte im Umgang mit Autoguiding-Software am Beispiel des Programms PHD Guiding.
 Zielsicher zu tief belichteten Aufnahmen: Teleskop
mit Autoguiding-Equipment in Aktion. Mario Weigand
Zielsicher zu tief belichteten Aufnahmen: Teleskop
mit Autoguiding-Equipment in Aktion. Mario Weigand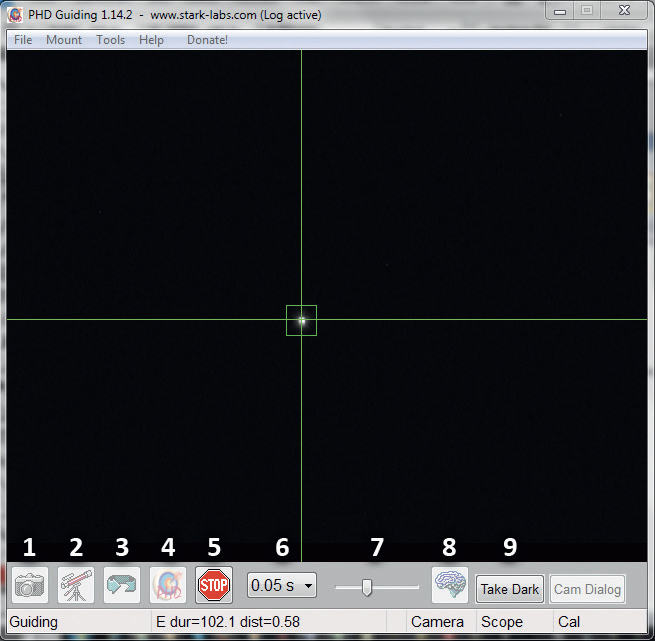 Abb. 2: Hauptfenster von PHD mit den
wichtigen Funktionen. Mario Weigand
Abb. 2: Hauptfenster von PHD mit den
wichtigen Funktionen. Mario WeigandIn diesem Artikel geht es um die ersten Schritte im Umgang mit Autoguiding-Software. Eine kostenfreie Lösung hierfür bietet das Programm PHD Guiding (Push Here, Dummy). Dieses hat den Anspruch, besonders leicht bedienbar zu sein. Unterstützt werden praktisch alle etablierten Nachführkameras.
Das Programm ist übersichtlich gestaltet und ermöglicht damit einen leichten Einstieg in die Thematik. Nach dem Start zeigt sich das Programmfenster: Über das Standard-Menü sind die Grundeinstellungen erreichbar. Unterhalb davon sind das aktuelle Kamerabild und schließlich die Steuerleiste mit den wichtigsten Funktionen zu sehen. Das Programmfenster schließt unten mit einer Statusleiste ab, die wichtige Meldungen zeigt.
Voreinstellungen
Bei erstmaliger Verwendung müssen die nötigen Verbindungen zum Autoguider und zur Montierung eingerichtet werden. Dabei ist es wichtig, ob der PC oder der Autoguider über den ST-4-Anschluss direkt mit der Montierung kommuniziert. Im letzteren Fall muss im Menü unter "Mount" die Option "OnCamera" gewählt werden. Verwendet man eine Montierung ohne ST-4-Schnittstelle, sondern nur mit serieller Schnittstelle (RS-232), erfolgt die Steuerung mithilfe des ASCOM-Treibers.
1. Verbindung herstellen
Über die Tasten 1 und 2 werden in dieser Reihenfolge die Verbindungen zur Nachführkamera bzw. Montierung aufgebaut. Bei einer ASCOM-Verbindung öffnet sich das entsprechende Dialogfenster.
2. Autoguider vorbereiten
Bei stehender Verbindung bildet das Fokussieren des Autoguiders den ersten Schritt zur Vorbereitung des Systems. Hierfür ist es gegebenenfalls sinnvoll, die Belichtungszeit auf fünf Sekunden zu erhöhen, damit auch stark defokussierte Sterne sichtbar werden. Anschließend tastet man sich im Loop-Modus (Taste 3) schrittweise an die Fokusposition heran. Mit einer Markierung der Fokusposition am Okularauszug kann dieser Vorgang bei den nächsten Malen beschleunigt werden.
Für den Nachführbetrieb sind Belichtungszeiten um eine Sekunde sinnvoll. Ein geeigneter Leitstern darf nicht zu schwach, sollte aber auch nicht überbelichtet sein. Manuell erfolgt die Auswahl durch einfaches Anklicken des gewünschten Sterns. Daraufhin wird in der Statusleiste ein S/N-Wert angezeigt, der bei der Beurteilung des Leitsterns hilft. Er gibt an, wie gut sich der Stern vom Untergrundrauschen abhebt. Zu empfehlen sind Werte von 4,0 oder höher. Steht kein geeigneter Leitstern zur Verfügung, kann das Bildfeld über die Leitrohrschellen, einen Exzenter oder den Off-Axis-Guider verstellt werden.
Ist die richtige Einstellung gefunden, sollte noch ein Dunkelbild mit Deckel auf der Öffnung der nachführenden Optik aufgenommen werden (Taste 9), um Hotpixel zu korrigieren. Das Dunkelbild wird daraufhin automatisch von jedem weiteren Bild abgezogen. Wird die Belichtungszeit verändert, muss ein neues Dunkelbild erstellt werden. Ist bei der Aufnahme etwas schiefgelaufen, kann das fehlerhafte Dunkelbild über das Menü "Tools/Erase Dark" gelöscht werden.
3. Kalibrierung
Bevor es mit der Nachführkorrektur losgehen kann, muss der Autoguider noch kalibriert werden. Das bedeutet, PHD Guiding muss lernen, wie und wie stark die Montierung auf die Steuerbefehle reagiert. Ist der Loop-Modus noch aktiv, wird er nun beendet. Mit einem anschließenden Klick auf Taste 4 beginnt PHD Guiding mit der Kalibrierung. Nacheinander werden in beiden Achsen Steuersignale gegeben und man kann beobachten, wie der Leitstern sich langsam bewegt.
Die Kalibrierung kann mit dem Parameter "Calibration step" in den Einstellungen (Taste 8) für die verwendete Nachführ-Brennweite optimiert werden. Bei 500mm sind beispielsweise 1000ms sinnvoll, bei langen Brennweiten um 2000mm sind kürzere Kalibrierungsschritte von 250ms ratsam.
War die Kalibrierung erfolgreich, geht das Programm sofort zum Nachführen über. In der Statusleiste erscheint dann die Meldung "Guiding" und die Sternmarkierung ist grün.
4. Autoguiding-Prozess und Feineinstellungen
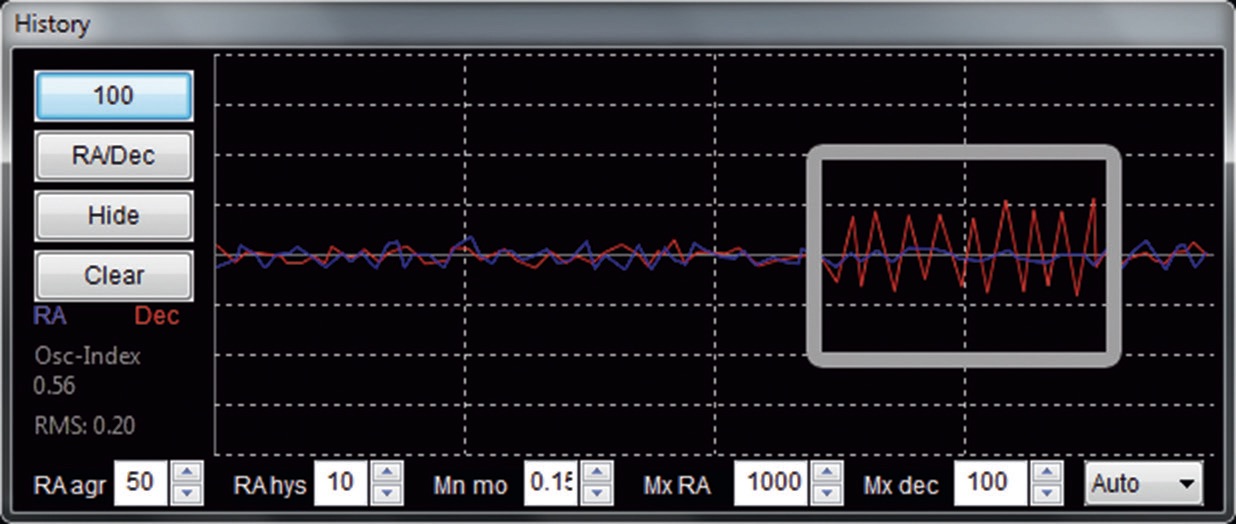 Abb. 3: Fehlerdiagramm mit ruhiger Nachführung. Der Ausschnitt rechts zeigt eine Schwingung in Deklination aufgrund zu hoch eingestellter Aggressivität. Mario Weigand
Abb. 3: Fehlerdiagramm mit ruhiger Nachführung. Der Ausschnitt rechts zeigt eine Schwingung in Deklination aufgrund zu hoch eingestellter Aggressivität. Mario WeigandDas Funktionieren der Nachführung kann mit den Fehlerdiagrammen, die über das Menü "Tools/Enable Graph" zugänglich sind, kontrolliert werden. Ein blauer und ein roter Graph stellen die Abweichungen in Rektaszension und Deklination dar.
Mögliche Probleme:
Schwache Leitsterne verliert das Programm eventuell irgendwann. Dies erkennt man an einer gelben Sternmarkierung. Hier helfen nur ein hellerer Leitstern, eine längere Belichtungszeit oder der Parameter "Noise reduction" (siehe unten).
Funktioniert die Nachführkorrektur nicht richtig, driftet der Stern mit der Zeit von der Sollposition weg. PHD Guiding macht dies mit einer roten Warnmeldung erkennbar.
Eine häufige Ursache ist eine fehlerhafte Kabelverbindung mit der Montierung oder ein zu großes Getriebespiel.
Weiterhin gibt es einige wichtige Parameter, erreichbar über Taste 8, die die Qualität der Nachführkorrektur beeinflussen. Dazu muss gesagt werden, dass es universell richtige Parameter nicht gibt. Die optimalen Einstellungen müssen für jedes Teleskop individuell gefunden werden. Die folgenden Hinweise können helfen:
 Abb. 4: Fenster für die erweiterten Einstellungen. Mario Weigand
Abb. 4: Fenster für die erweiterten Einstellungen. Mario WeigandRA Aggressiveness:
Die Aggressivität ist ein Maß dafür, wie stark das Programm auf einen Nachführfehler reagieren soll. Für eine Optimierung beobachtet man das Fehlerdiagramm. Ist die Aggressivität zu niedrig eingestellt, braucht der Guider zu lange, um den Leitstern nach einem Nachführfehler wieder zu zentrieren. Der Wert sollte dann in Schritten von zehn erhöht werden. Ist der Wert zu hoch eingestellt, beobachtet man hingegen ein Übersteuern – der Stern "pendelt" dadurch um die Sollposition (vgl. Abb. 3). Es ist hier jedoch das Zusammenspiel mit der nachfolgend beschriebenen Hysterese zu beachten!
RA Hysteresis:
Die Hysterese ist eine Reaktionsschwelle. Der kleinste Fehlerwert, ab dem korrigiert werden soll, kann hier geändert werden. Ist die Schwelle zu niedrig, reagiert das Guiding-System auf Seeing bedingte Schwankungen, was ähnlich wie bei der Aggressivität zu einem Übersteuern führen kann. Dieser Wert wird ebenfalls in Schritten von zehn optimiert.
Noise reduction:
Bei schwachen Leitsternen kann man sich hier mit einem Pixel-Binning helfen. 2×2 oder 3×3 Pixel können zusammengefasst werden, um den S/N-Wert zu verbessern. Gleichzeitig wird aber die Auflösung verringert. Bei einem Leitrohr sehr kurzer Brennweite kann sich die Qualität der Nachführkorrektur durch Pixel-Binning jedoch verschlechtern. Wichtig: Verändert man diese Einstellung, ist ein neues Dunkelbild nötig! Bei den restlichen Parametern werden die Voreinstellungen im Allgemeinen nicht verändert. Dem korrekt nachgeführten, langbelichteten Astrofoto steht nun nichts mehr im Wege!
Autor: Mario Weigand / Lizenz: Oculum-Verlag GmbH